
Pada penelitian infrastruktur di EBRAINS, para ahli saraf kognifit, pemodel komputasi, serta para ahli robot saling bekerja sama membuat robot yang bisa meniru otak manusia.
“Kami percaya bahwa robot dapat ditingkatkan melalui penggunaan pengetahuan tentang otak. Tetapi pada saat yang sama, ini juga dapat membantu kita lebih memahami otak kita sendiri,” kata Cyriel Pennartz, Profesor Kognisi dan Sistem Neurosains di Universitas Amsterdam.
Dalam Proyek Otak Manusia, Pennartz telah berkolaborasi dengan pemodel komputasi Shirin Dora, Sander Bohte dan Jorge F. Mejias untuk membuat arsitektur jaringan saraf kompleks untuk persepsi berdasarkan data kehidupan nyata dari tikus.
Model mereka, dijuluki “MultiPrednet” terdiri dari modul untuk input visual dan sentuhan, dan sepertiga yang menggabungkannya.
“Apa yang dapat kami tiru untuk pertama kalinya, adalah bahwa otak membuat prediksi di berbagai indera yang berbeda,” Ujar Pennartz. “Jadi Anda bisa memprediksi bagaimana perasaan sesuatu dari melihatnya, dan sebaliknya.” Tambahnya.
Baca juga : Mulai Bangun Stasiun Luar Angkasa, Cina Uji Coba Manuver Lengan Robotik Satelit
Cara kerja robot EBrains
Cara jaringan EBrains melatih dirinya sendiri menyerupai cara para ilmuwan berpikir bagaimana otak kita belajar.
Dengan terus-menerus menghasilkan prediksi tentang dunia, membandingkannya dengan input sensorik yang sebenarnya, dan kemudian mengadaptasi jaringan untuk menghindari sinyal kesalahan di masa depan.
Untuk menguji kinerja MultiPrednet dalam tubuh, para peneliti bekerja sama dengan Martin Pearson di Bristol Robotics Lab.
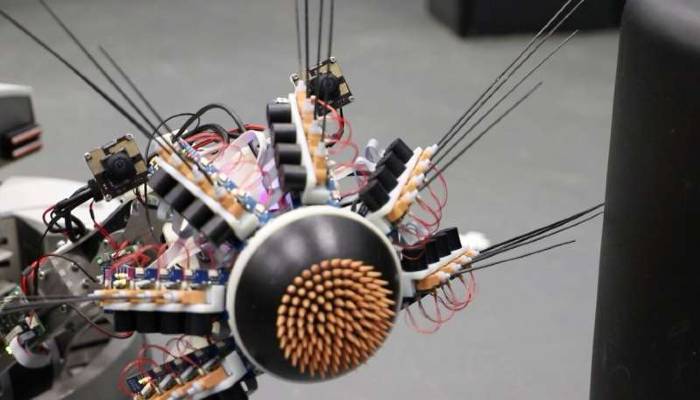
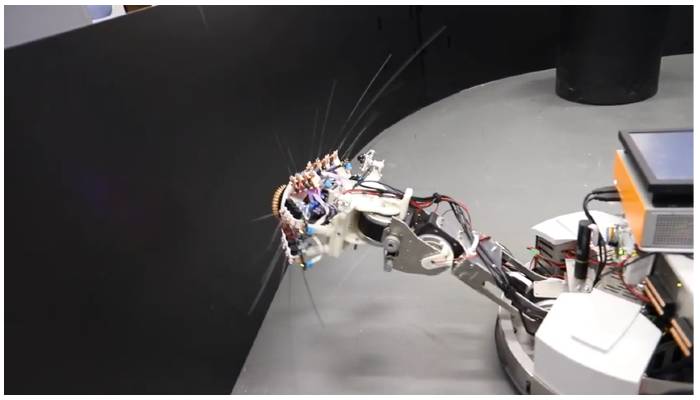
Bersama-sama mereka mengintegrasikannya ke dalam Whiskye, robot mirip hewan pengerat yang secara mandiri menjelajahi lingkungannya.
Denga menggunakan kamera yang dipasang di kepala untuk mata, dan 24 kumis buatan untuk mengumpulkan informasi taktil.
Para peneliti mengamati indikasi pertama bahwa model berbasis otak memiliki keunggulan dibandingkan sistem pembelajaran mendalam tradisional: Terutama dalam hal navigasi dan pengenalan adegan yang sudah dikenal, MultiPredNet tampaknya berkinerja lebih baik.
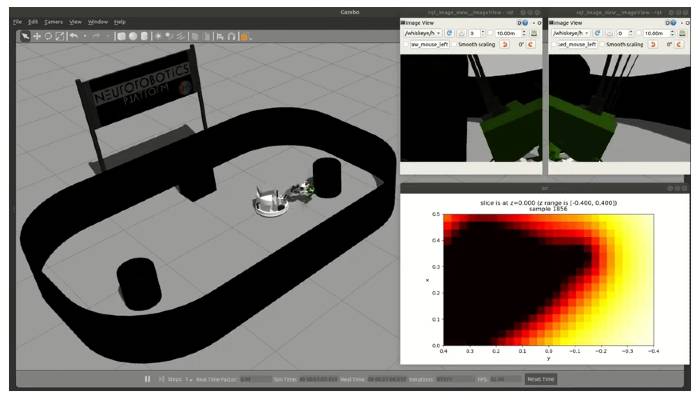
Untuk mempercepat penelitian ini, robot telah dibuat ulang sebagai simulasi pada Platform Neurorobotics dari infrastruktur penelitian EBRAINS.
“Ini memungkinkan kami melakukan eksperimen berdurasi panjang atau bahkan paralel di bawah kondisi yang terkendali,” kata Pearson.
“Kami juga berencana untuk menggunakan Platform Komputasi Kinerja Tinggi dan Neuromorfik untuk model kontrol dan persepsi yang jauh lebih detail di masa mendatang.” Ungkapnya
Baca artikel selanjutnya :






